Роботы FANUC SCARA, предлагая высший уровень в скорости и точности, идеально подходят для заданий сборки, захвата и размещения, дефектовки деталей и упаковки. В зависимости от ваших потребностей, мы можем предложить роботов FANUC SCARA с грузоподъемностью 3 кг, 6 кг или 12 кг. Все роботы FANUC SCARA работают в 360-градусной рабочей зоне, и благодаря специальной конструкции занимают небольшую площадь. Интегрированные средства обеспечения предотвращают риск столкновения.
Как узнать, в каких случаях робот SCARA является правильным выбором для вашей сферы применения?
Роботы SCARA являются популярным выбором для предприятий, занимающихся роботизированной сборкой небольших изделий. SCARA – это сокращение от Selective Compliance Articulated Robot Arm (шарнирно-сочлененный робот с избирательной податливостью манипулятора), что означает, что он обладает податливостью по осям X-Y, и является жестким по оси Z. Конфигурация SCARA уникальна и разработана для выполнения различных операций по погрузке-разгрузке материалов.
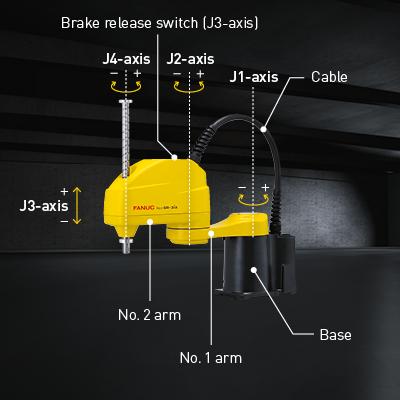
Конструкция SCARA состоит из двух манипуляторов, соединенных на основании, а также точки пересечения первого и второго манипуляторов. Два независимых двигателя используют инверсную кинематику и интерполяцию в шарнирах J1 и J2 для управления движением робота SCARA по осям X-Y. Окончательное местоположение по осям X-Y на конце второго манипулятора зависит от угла J1, угла J2, длины первого манипулятора и длины второго манипулятора.
Сочленение
Сочленение – это тип движения и степени свободы, необходимые в конкретной сфере применения. Для робота количество шарниров, положение шарниров, а также ось, которую контролирует каждый шарнир, определяют степень свободы. SCARA – это четырехосные роботы, которые двигаются по осям X-Y-Z и вращаются вокруг оси Z.
У робота SCARA отсутствует движение наклона и сгибания, присущее шестиосным роботам, поэтому для тех областей применения, где необходимы наклон и сгибание, имеются механизмы, которые могут быть добавлены для обеспечения дополнительного движения по оси при условии, что робот SCARA будет соответствовать требованиям к грузоподъемности.
Большинство подъемно-транспортных операций, а также операций по сборке небольших изделий, включающих в себя перемещение детали из точки А в точку В, идеально подходят для роботов SCARA, поскольку данные операции, как правило, включают в себя перемещение детали по осям X-Y-Z с небольшим вращением по оси Z. Операции по заворачиванию винтов также прекрасно подходят для роботов SCARA, так как их можно с легкостью выполнять благодаря оси вращения. В дополнение к операциям дозирования робот SCARA может брать детали и подносить их к дозирующему устройству, либо дозирующий инструмент может быть прикреплен к валу робота.
Рабочее пространство
Рабочее пространство или площадь пространства, которую робот может охватывать физически, являются критическим фактором. Для роботов SCARA, дельта- или шестиосевых роботов длина различных звеньев, а также ограничения движения шарниров являются важными факторами для рассмотрения.
Как правило, роботы SCARA имеют рабочее пространство цилиндрической формы, при этом различия заключаются в диаметре и глубине цилиндра. Общая длина первого и второго манипуляторов определяет диаметр круга, в то время как длина хода по оси Z определяет глубину цилиндра.
В большинстве областей применения рабочее пространство робота SCARA ограничивается передней и боковыми сторонами. Пространство сзади не сможет использоваться, если из задней части выходят кабели и пневматические шланги. Некоторые роботы SCARA имеют опциональные выходы сзади, которые делают возможной работу позади робота.
Грузоподъемность
В большинстве областей применения роботы выполняют операции по сборке или подъемно-транспортные операции, которые требуют наличия исполнительного органа. Это может быть простой захват или многоцелевой инструмент на конце манипулятора с дозирующими устройствами или отвертками.
Вес и инерция исполнительного органа, а также детали определяют максимальную грузоподъемность и требования к инерции, которые должны находиться в пределах эксплуатационных характеристик робота.
Большинство производителей роботов имеют не менее двух вариантов роботов SCARA, которые соответствуют различным значениям грузоподъемности и инерции. Понимание требований к грузоподъемности важно – если работу может выполнить небольшой робот, нет необходимости занимать полезную площадь более крупной моделью.
Скорость
Скорость является важным фактором при выборе робота, а роботы SCARA обычно являются одними из самых быстрых на рынке. Благодаря четырем осям они имеют меньше подвижных шарниров и настроены таким образом, что J1 и J2 управляют перемещением по осям X-Y, а J3 и J4 управляют перемещением по оси Z и вращательным движением. Это упрощает расчеты инверсной кинематики, поскольку требует меньше времени. Если продолжительность цикла является критически важным фактором, вам подойдет решение SCARA.
Площадь размещения
Площадь размещения – это пространство, которое занимает робот SCARA. Как правило, роботы SCARA имеют меньшую площадь размещения, чем декартовы или дельта-роботы с тем же радиусом рабочей зоны. Роботы SCARA с большой рабочей зоной имеют большую площадь размещения из-за увеличенных размеров двигателя и основания, необходимого для устойчивости.
Повторяемость
Как правило, роботы SCARA имеют наилучшую повторяемость среди роботов всех типов. Ошибки, происходящие в плоскости X-Y, вызваны наличием двух двигателей на J1 и J2. Роботы иных типов имеют три или больше двигателей, которые обеспечивают положение X-Y. Чем больше двигателей, тем более высока вероятность возникновения ошибок. Отличная повторяемость является ключевым фактором при выполнении малых сборочных операций, где допустимые погрешности могут быть в пределах нескольких микрон. Сюда относятся, например, вставка соединителей в печатные платы или перемещение иглы в небольшую канавку для дозирования.



 Роботы FANUC SCARA, предлагая высший уровень в скорости и точности, идеально подходят для заданий сборки, захвата и размещения, дефектовки деталей и упаковки. В зависимости от ваших потребностей, мы можем предложить роботов FANUC SCARA с грузоподъемностью 3 кг, 6 кг или 12 кг. Все роботы FANUC SCARA работают в 360-градусной рабочей зоне, и благодаря специальной конструкции занимают небольшую площадь. Интегрированные средства обеспечения предотвращают риск столкновения.
Роботы FANUC SCARA, предлагая высший уровень в скорости и точности, идеально подходят для заданий сборки, захвата и размещения, дефектовки деталей и упаковки. В зависимости от ваших потребностей, мы можем предложить роботов FANUC SCARA с грузоподъемностью 3 кг, 6 кг или 12 кг. Все роботы FANUC SCARA работают в 360-градусной рабочей зоне, и благодаря специальной конструкции занимают небольшую площадь. Интегрированные средства обеспечения предотвращают риск столкновения. применения. Для робота количество шарниров, положение шарниров, а также ось, которую контролирует каждый шарнир, определяют степень свободы. SCARA – это четырехосные роботы, которые двигаются по осям X-Y-Z и вращаются вокруг оси Z.
применения. Для робота количество шарниров, положение шарниров, а также ось, которую контролирует каждый шарнир, определяют степень свободы. SCARA – это четырехосные роботы, которые двигаются по осям X-Y-Z и вращаются вокруг оси Z.
 SCARA имеют меньшую площадь размещения, чем декартовы или дельта-роботы с тем же радиусом рабочей зоны. Роботы SCARA с большой рабочей зоной имеют большую площадь размещения из-за увеличенных размеров двигателя и основания, необходимого для устойчивости.
SCARA имеют меньшую площадь размещения, чем декартовы или дельта-роботы с тем же радиусом рабочей зоны. Роботы SCARA с большой рабочей зоной имеют большую площадь размещения из-за увеличенных размеров двигателя и основания, необходимого для устойчивости.