Барнаул, ул.Попова, д.11, т. +7 (3852) 59-08-07, +7 (383) 284-78-08
sales@roskip.ru
sales@roskip.ru
Екатеринбург, ул.Уральская, д.3, т. +7 (343) 385-04-34, ural@roskip.ru
Авторизация
|
Каталог продукции
FESTO портальная 2D система EXCH
Н-портал – это полнофункциональная, бюджетная альтернатива дельта-роботам – экономичный, с большим сроком службы и низким энергопотреблением.
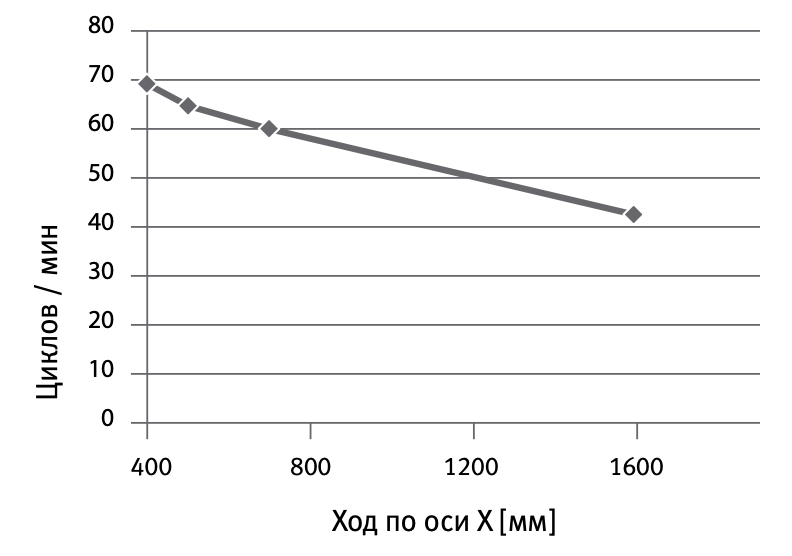
Максимальная динамика с производительностью до 100 циклов в минуту и оптимальное использование пространства для установки – вот что характеризует высокоскоростную систему перемещения EXCH с функциональностью робота. 2х-координатный промышленный робот EXCH может свободно перемещаться по всей прямоугольной рабочей области. Два неподвижных двигателя делают его чрезвычайно динамичным и обеспечивают отличное ускорение: его подвижный собственный вес минимален, как и потребление энергии.
Плоскостной манипулятор (XY) чрезвычайно компактный, плоский, имеет отличное соотношение монтажного пространства к рабочей области.
Конструкция манипулятора и соответствующая система управления отлично подходят как для точного перемещения от точки к точке (Point-to-Point), так и для движения по сложному криволинейному контуру.
Применения:
Особенности и преимущества:
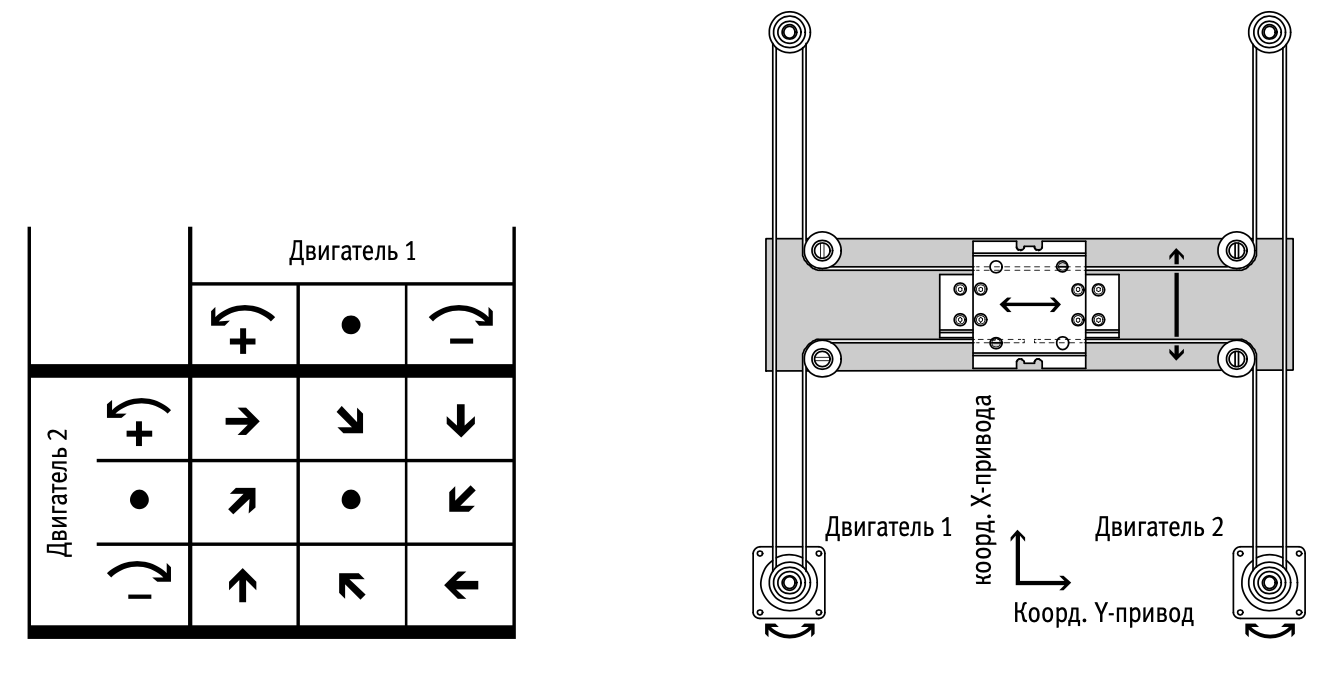
Принцип действия
Каретка перемещается зубчатым ремнем в 2-мерном пространстве (ось X-Y). Система приводится в действие 2 стационарными двигателями. Двигатели связаны с зубчатым ремнем. Он направляется обводными роликами, позволяю щими подводить каретку за счет соответствующей активации двигателей к любой произвольно выбранной позиции в рабочей зоне. За счет применения установленных снаружи элементов могут быть приняты и другие процессы независимых координатных Z-приводов.
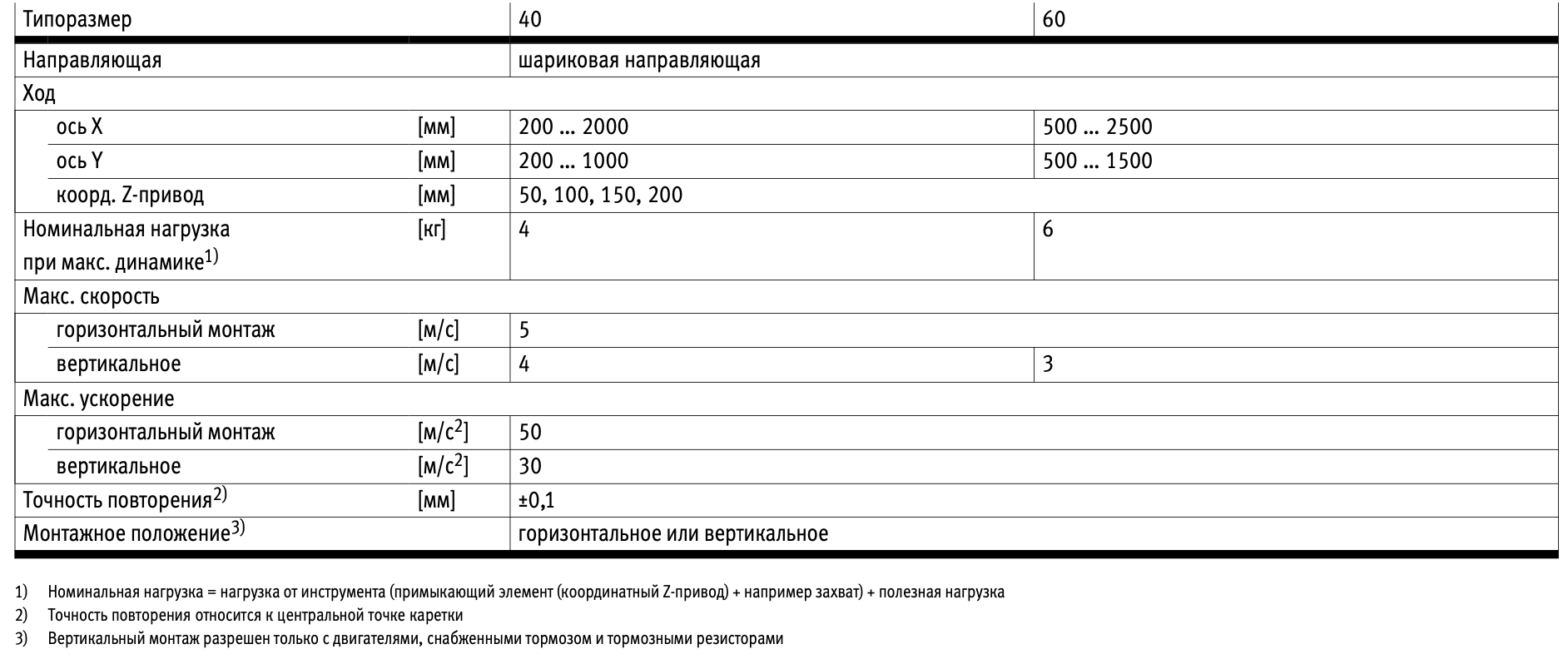
 Технические данные
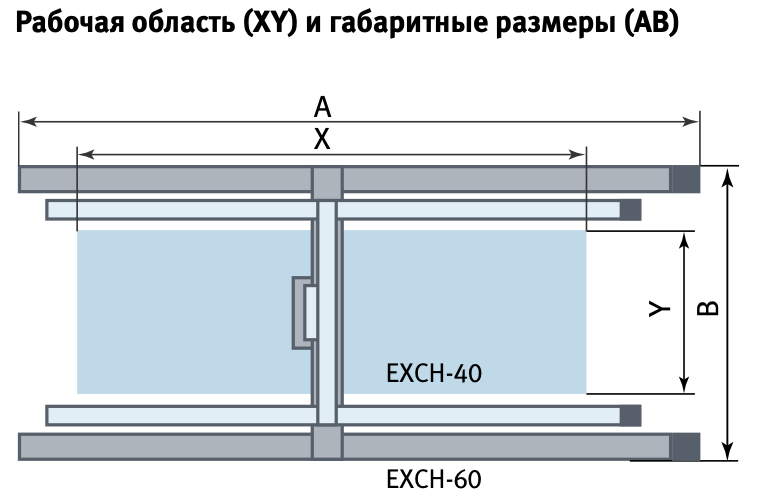
Рабочая область и габариты
Проектирование систем перемещения с Handling Guide Online!
Сконфигурировать систему перемещения можно на сайте производителя
|




Copyright © 2005-2024 ООО "Техком-Автоматика"
Барнаул, ул.Попова, д.11, т. +7 (3852) 59-08-07, +7 (383) 284-78-08
sales@roskip.ru
Екатеринбург, ул.Уральская, д.3, т. +7 (343) 385-04-34, ural@roskip.ru
Барнаул, ул.Попова, д.11, т. +7 (3852) 59-08-07, +7 (383) 284-78-08
sales@roskip.ru
Екатеринбург, ул.Уральская, д.3, т. +7 (343) 385-04-34, ural@roskip.ru
e-mail: sales@roskip.ru
|
|